Полеориентированное управление СДПМ получило широкое распространение так как оно позволяет быстро, плавно и точно управлять положением вала, скоростью и моментом электродвигателя. Но для реализации такого метода управления необходимо знать положение ротора.
- датчиковый - обратная связь по датчику положения и/или датчику скорости;
- бездатчиковый - информация о положении ротора вычисляется математически в режиме реального времени на основании той информации, которая имеется в системе управления.
Применение того или иного метода полеориентированного управления определяется областью применения электропривода. При небольших диапазонах изменения скорости (не более 1:100) и требованиях к точности ее поддержания не более ±0,5% применяют бездатчиковое векторное управление электродвигателем. Если же скорость вращения вала изменяется в широких пределах (до 1:10000 и более), имеются требования к высокой точности поддержания скорости вращения (до ±0,02% при частотах вращения менее 1 Гц) или есть необходимость позиционирования вала, а также при необходимости регулирования момента на валу электродвигателя на очень низких частотах вращения, применяют методы векторного управления с обратной связью по скорости.
Бездатчиковое полеориентированное управление СДПМ с ротором с явно выраженными полюсами
- определение начального положения ротора для запуска электродвигателя;
- управление электродвигателем на низких скоростях, т.е. разгон электродвигателя до скорости (обычно составляющей 10% от номинальной), где генерируемая противо-ЭДС становится достаточной для определения положения ротора;
- разгон электродвигателя до номинальной (заданной) скорости вращения, регулирование скорости вращения двигателя во время работы, поддержание максимального момента вращения.
Бездатчиковый старт
Задача корректного запуска синхронного электродвигателя является одной из главных в современных системах управления. Для этого необходимо знать точное положение ротора. В том случае, когда отсутствует абсолютный датчик положения, самое простое решение – подать напряжение на одну из фаз и дождаться пока ротор сориентируется по полю. Но в том случае если положение полюсов ротора не совпало с этой фазой, ротор может совершить неконтролируемое движение назад, а в том случае если ротор имеет всего одну пару полюсов (такие чаще всего используются на высокооборотистых электродвигателях) и вовсе не принять необходимое положение.
Так как ротор электрической машины в начальный момент находится в неподвижном состоянии, он не создает обратной ЭДС, которая позволяет определить его положение, поэтому все методы определения начального положения ротора используют специальный тестовый сигнал, который подается на статор машины, и специальный алгоритм анализа отклика на него.
Существуют следующие методы бездатчикового определения начального положения ротора:carrier signal injection (впрыскивание несущего сигнала высокой частоты);PWM method (ШИМ метод);the current impulse method (метод импульсов тока).
Так как определить положение ротора и отличить северный полюс от южного позволяет только третий метод, он является оптимальным для решения задачи бездатчикового старта. Подход основан на исследовании изменения индуктивности катушек статора в зависимости от положения ротора. Он включает применения правильной последовательности импульсов напряжения прикладываемых к катушкам статора и измерении пикового значения полученных токов для оценки положения ротора.
Время определения начального положения без датчика занимает меньше 15 мс, точность находится в пределах ±6%
Чтобы повысить точность метода при первом подключении электродвигателя на стенде проводися калибровка системы.
Бездатчиковое управление электродвигателем
На низкой скорости
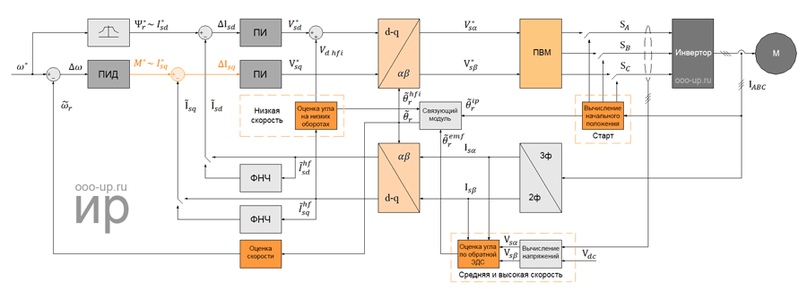
На низких оборотах (0-10% от номинальной скорости вращения) величина обратной ЭДС, генерируемая электродвигателем, недостаточна для определения положения вращающегося ротора. Поэтому информацию о положении ротора получают за счет разности индуктивностей по осям d и q, имеющуюся у СДПМ с ротором с явно выраженными полюсами. Для этого на основной управляющий сигнал накладывается высокочастотная составляющая (сигнал модулируется). После чего выделяется высокочастотная составляющая, из которой извлекается информация о положении ротора и скорости вращения электродвигателя.
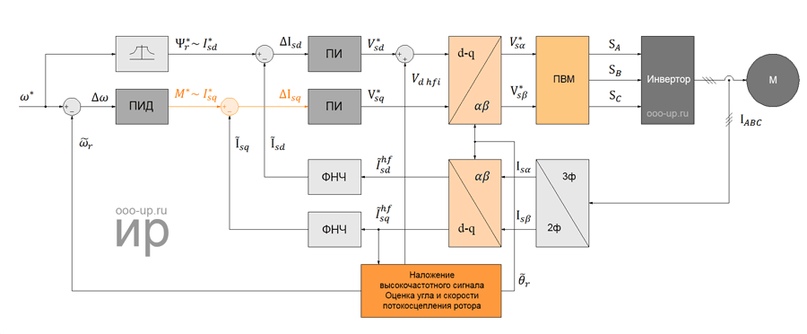
Бездатчиковое полеориентированное управление синхронным двигателем с постоянными магнитами с ротором с явно выраженными полюсами на низких оборотах
В основном диапазоне
Под основным диапазоном скоростей (10% - 100% от номинальной скорости вращения) мы понимает такой режим работы, когда скорость электропривода достаточна для того, чтобы уровень обратной ЭДС был достаточным для того, чтобы вычислить положение ротора с приемлемой точностью. Для вычисления угла используется наблюдатель состояния, который реализует вычисление всех переменных и параметров двигателя с постоянными магнитами, необходимых, для реализации алгоритма адаптивно-векторного управления, по информации о двух фазных токах статора (снимаемых с токовых датчиков) и двух заданных значениях фазных напряжений.
Высокоскоростные решения
В таких приложениях как центробежные компрессоры, турбомоллекулярные насосы требуется применять высокооборотистые электродвигатели со скоростью вращения больше 60000 об/мин. Для этого используются электродвигатели с постоянными магнитами, ротор которых имеет одну пару полюсов. Так как датчик положения ротора на высоких оборотах имеет высокую погрешность и не всегда его возможно сделать конструктивно, такие приложения требуют использования безатчиковых систем управления.
- бездатчиковое определение начального положения;
- разгон скалярным методом;
- векторное управление на высоких оборотах (в случае меняющейся нагрузки).
Источник: http://engineering-solutions.ru/motorcontrol/sensorless/
 admin
admin
