ПРОБЛЕМЫ ФОРМИРОВАНИЯ ЗАКОНОВ УПРАВЛЕНИЯ
| Автор | Сообщение |
|---|---|
 admin
admin
|
|

|
Термином ПЛК обозначают устройства, осуществляющие преобразование, обработку, хранение информации и выработку команд управления или управляющих/регулирующих воздействий, реализованные на базе микропроцессорной техники и являющиеся по сути специализированными управляющими вычислительными комплексами для работы в локальных и распределенных системах управления в реальном масштабе времени (рис.1.1).
Основная функция ПЛК – это формирование сигнала рассогласования между регулируемой величиной и ее заданным значением, а также динамическое преобразование сигнала рассогласования по типовым алгоритмам (законам) регулирования. Одними из основных эксплуатационных требований, которым должны удовлетворять ПЛК, являются: 1. Безударность: — при переходе с одного из источников задания на другой в режиме автоматического управления также должен осуществляться безударно, например, с внешнего источника задания на внутренний (ручное задание, на программное изменение задания); 2. Ограничение выходного сигнала ПЛК по верхнему и нижнему уровням и сигнализация о предельных значениях этих уровней; при достижении соответствующего уровня ограничения интегрирующее устройство отключается от источника входного сигнала, благодаря этому регулятор работает всегда в зоне линейности. Выполнение требований 1 и 2 осуществляется посредством управления операциями интегрирования, входящими в соответствующие алгоритмы (функциональные блоки): а) при переключениях с одного из режимов на другой управление сводится к отключению интегратора и формированию для него других начальных условий, соответствующих новому режиму (иногда эти процедуры называют «обратным счетом»), именно это обеспечивает безударность; б) при выходе значений сигнала за предельные (например, yMIN или yMAX), управление сводится к запрету операции интегрирования и ее запуску после возвращения значений сигнала в рабочий диапазон. 3. Гальваническое разделение входных и выходных цепей (эта задача решается на уровне соответствующих устройств сопряжения с объектом (УСО)); 4. Связь с управляющими комплексами верхних уровней иерархии; 5. Автоподстройка и настройка (адаптивность) динамических параметров регулятора (адаптивные регуляторы). Всякий процесс регулирования (управления) предполагает наличие двух подсистем (рис.1.2): управляемой системы, т.е. одного или нескольких объектов управления и управляющей или регулирующей системы (регулятора), которые в совокупности образуют систему автоматического регулирования (САР).
Объект управления (ОУ). Любой технический объект (ТО) или технологический процесс (ТП): станок, печь для термообработки, двигатель, технологический агрегат и т.д., для обеспечения нормального функционирования которого строится система автоматического (или автоматизированного) управления, носит название объекта управления или управляемого объекта. Другими словами, объект управления — это основной элемент САР, требуемый режим которого должен поддерживаться регуляторами (одним или несколькими). Объект управления выполняет определенные технические операции над материальными и/или информационными компонентами. Исполнительный механизм (ИМ) — это устройство, с помощью которого в САР непосредственно осуществляется изменение режима объекта управления; обычно это часть объекта управления ' вентили паросиловых установок, обмотки возбуждения электрических машин, рули самолета и т.д. Всякий объект управления, обладающий массой (в электротехнике и электронике — это наличие емкостей и индуктивностей), является динамическим, поскольку под действием внешних сил и моментов (конечной величины) со стороны объекта управления возникает соответствующая реакция и его положение (или состояние) не может быть изменено мгновенно. Основная функция ПЛК (регулятора) — вырабатывать управляющие (регулирующие) воздействия, которые обеспечивают выполнение объектом требуемых функций. Для построения САР необходимо знать математическое описание (математическую модель) объекта управления, т.е. зависимость, связывающую между собой его параметры. На рис.1.3 приведена структурная схема одноконтурной САР, используемая при расчетах.
Физическую величину x(t), подлежащую регулированию, называют регулируемой или выходной величиной. Воздействие g(t), которое характеризует требуемое (желаемое) значение регулируемой величины, называют задающим воздействием (в некоторых задачах его называют уставкой). Разность ε(t) между заданным g(t) и фактическим x(t) значением регулируемой величины называют ошибкой или рассогласованием. Воздействие u(t), вырабатываемое регулятором для осуществления требуемого закона изменения регулируемой величины, называют регулирующим воздействием. Воздействие f(t), стремящееся нарушить требуемую функциональную связь между задающим воздействием и регулируемой величиной, называют возмущающим воздействием. Таким образом, можно сказать, что в процессе автоматического регулирования осуществляется преобразование задающего воздействия в регулируемую величину. В общем случае как задающее воздействие, так и регулируемая величина могут состоять из совокупности различных физических сигналов, т.е. иметь векторный характер. В этом случае система является многомерной и должна описываться в терминах пространства состояний. Обратная связь, замыкающая систему, передает результат измерения выходной величины на вход системы. Задача системы состоит в том, чтобы возможно точнее воспроизводить на выходе x(t) задаваемый (на входе) закон изменения g(t) и возможно полнее подавлять влияние возмущающего воздействия f(t), а также других внешних и внутренних помех, если они имеются. Выходная величина x(t) сравнивается с входной величиной g(t). Для этих целей используется соответствующий датчик (измеритель) . На выходе сравнивающего устройства формируется рассогласование (ошибка)
Рассогласование ε служит источником воздействия на систему, причем система работает на уничтожение или сведение к допустимому малому значению величины этого рассогласования. 1.1. КЛАССИФИКАЦИИ САР В общем случае задающее воздействие может изменяться произвольно. По виду задающего воздействия САР классифицируют следующим образом: 1) при g(t) = const САР называют собственно системами автоматического регулирования ' они работают на поддержание постоянного значения регулируемой величины (например, уровня жидкости в баке/котле, скорости вращения вала двигателя, температуры в некотором замкнутом объеме и т.п.). Это типичные системы регулирования по заданной настройке/уставке регулятора. Такие системы называют также системами стабилизации (например, стабилизации напряжения на клеммах генератора, крена самолета и т.п.). 2) при g(t), заранее заданной во времени, т.е. когда задана программа (закон) изменения этого воздействия, говорят о программном автоматическом регулировании и о системах программного регулирования. При этом выходная/регулируемая величина должна следовать заданной программе/закону изменения во времени. 3) при g(t), изменяющейся случайным/произвольным образом, САР называют следящей системой. Законы регулирования, реализуемые ПЛК, могут быть получены на основе известных в теории автоматического регулирования методов коррекции, когда желаемые динамические характеристики системы достигаются с помощью последовательных и параллельных корректирующих устройств и обратных связей. В современных ПЛК это реализуется программно. В некоторых задачах исполнительные механизмы также участвуют в формировании закона регулирования (например, в импульсных регуляторах). По виду регулируемого параметра автоматические регуляторы подразделяются на регуляторы температуры, давления, влажности, разряжения, расхода, состава и т. п. По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на регуляторы с линейными и нелинейными законами регулирования. Примером регуляторов с нелинейным законом регулирования могут служить двухпозиционные регуляторы температуры в холодильных машинах. В трехпозиционных дискретных системах выходной сигнал может принимать три значения: –1, 0, +1, т.е. “меньше”, “норма”, больше”. Качество работы таких САР выше, хотя их надежность ниже. Регуляторы с линейным законом регулирования по математической зависимости между входными и выходными сигналами подразделяются на следующие основные виды: — пропорциональные (П-регуляторы); — пропорционально-интегральные (ПИ-регуляторы); — пропорционально-дифференциальные (ПД-регуляторы); — пропорционально-интегрально-дифференциальные (ПИД-регуляторы). Для подавления помех и пульсаций сумма П- и Д-составляющих часто демпфируется фильтром с регулируемой постоянной времени. При импульсном регулировании формирование ПИ'закона регулирования осуществляется совместно с интегрирующим исполнительным механизмом постоянной скорости. В зависимости от вида используемой энергии регуляторы подразделяются на электрические (электромеханические, электронные), пневматические, гидравлические и комбинированные. Наиболее часто используемыми в различных отраслях промышленности являются электрические регуляторы. Пневматические и гидравлические регуляторы, как правило, применяются во взрыво' и пожароопасных зонах. В зависимости от задающего воздействия и параметров объекта регулирования подбирают регулятор с определенной характеристикой Wр . Изменение Wр адекватно ведет к изменению коэффициентов дифференциального уравнения общего передаточного звена (регулятор'объект) и тем самым достигается необходимое качество регулирования. В промышленных регуляторах эти величины называются параметра ми настройки. Параметрами настройки являются: коэффициент усиления, зона нечувствительности, постоянная времени интегрирования, постоянная времени дифференцирования и т. д. Для изменения параметров настройки в регуляторах имеются органы настройки (управления). Кроме органов настройки основных параметров, регуляторы имеют также органы настройки, косвенно влияющие на эти коэффициенты или режимы его работы, например, органы настройки, изменяющие чувствительность регулятора, демпфирование входного сигнала и др. Исходя из характера протекания процесса управления требования к системе формируются по следующим показателям: 1.2. КОРРЕКЦИЯ ДИНАМИЧЕСКИХ СИСТЕМ И ЗАКОНЫ РЕГУЛИРОВАНИЯ — устойчивость; — качество переходного процесса. Точность системы задается и определяется в установившихся режимах. Устойчивость гарантирует затухание переходного процесса, после чего обеспечивается желаемое качество затухающего переходного процесса. В тех случаях, когда САР оказывается неустойчивой или когда качество ее работы не удовлетворяет поставленным требованиям, улучшение ее динамических свойств и повышение устойчивости в ряде случаев может быть достигнуто путем введения в систему последовательно со звеньями прямой цепи дополнительных функциональных блоков или же местных (локальных) обратных связей (ОС), которые обеспечивали бы получение управляющего сигнала в виде суммы сигнала рассогласования с дополнительными сигналами, характеризующими его производную, интеграл или иную функцию. Такие функциональные блоки называют корректирующими устройствами. Следует отметить, что наряду с формированием управляющего сигнала по ошибке может использоваться и внешнее воздействие (тоже с использованием соответствующих интегралов и производных). Можно указать следующие общие пути обеспечения заданного качества работы САР в переходном и установившемся режимах: — введение в прямую цепь усилителя с таким коэффициентом усиления, который рационально влиял бы на качество как в переходном, так и в установившемся режимах; — введение в прямую цепь интеграторов для обеспечения заданной точности работы САР в установившемся режиме: — введение в прямую и обратную цепи системы дифференцирующих звеньев для обеспечения заданного качества работы в переходном режиме. При использовании ПЛК чаще всего предполагается, что для коррекции применяются только те преобразования, которые заложены в типовые регуляторы («библиотечные» алгоритмы, функциональные блоки). Если библиотечные алгоритмы не позволяют осуществить те или иные законы регулирования (виды коррекции), то нужно использовать дополнительные преобразования. Речь идет о введении дополнительных функциональных преобразователей и включении их либо последовательно с основными звеньями контура регулирования, либо параллельно некоторым из них, либо комбинировании этих способов. Приведенные ниже сведения из теории автоматического регулирования позволяют использовать для коррекции системы преобразования, не входящие в состав стандартных регуляторов. 1.3. ВКЛЮЧЕНИЕ ФУНКЦИОНАЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ В ПРЯМУЮ ЦЕПЬ Увеличение Кп – это способ повышения точности системы, при этом уменьшаются все виды установившихся ошибок системы. Однако нужно помнить, что увеличение Кп ведет к ухудшению условия устойчивости, а значит, и качества переходного процесса. При некотором Кп > Ккр (критическое значение) система становится неустойчивой. Поэтому увеличение Кп целесообразно делать одновременно с введением производной (рис.1.4). Введение производной от ошибки (как в чистом виде, так и с инерционностью) представляет собой простейший способ улучшения качества переходного процесса.
Из-за наличия дифференцирующего звена (см. рис.1,4) регулятор формирует сигнал управления u(t) с прогнозом: если амплитуда ε(t) увеличивается, производная ε'(t) положительна и значение сигнала u(t) увеличивается. С момента уменьшения сигнала ε(t) сигнал ε'(t) и сигнал u(t) интенсивно уменьшается (рис.1.5).
Чаще всего производная вводится не в чистом виде, а с инерционностью, например, в виде звена с передаточной функции
где s – символ комплексной переменной преобразования Лапласа. При введении воздействия по производной осуществляется положительный сдвиг по фазе, увеличивая тем самым запас устойчивости и улучшая качество переходного процесса. Для подавления помех и пульсаций сумма П- и Д-составляющих может быть задемпфирована фильтром с регулируемой постоянной времени Тф. В случае неидеального дифференцирования (с инерционностью) этот эффект несколько уменьшается количественно, но качественно сохраняется. Пусть имеется астатическая система с интегрирующим и апериодическим звеньями, причем требуется уменьшить динамические ошибки этой системы и повысить ее быстродействие. Если просто увеличить усиление системы, то это может привести к уменьшению запаса устойчивости или полной потере устойчивости системы. Иной результат будет достигнут при дополнительном воздействии по производной сигнала рассогласования, осуществимом посредством последовательного включения в контур регулирования дифференцирующего звена. Построив амплитудно-фазовые характеристики исходной системы и той же астатической системы с последовательно включенным дифференцирующим звеном, можно установить, что добавление производной сигнала рассогласования приводит к повышению запаса устойчивости системы по фазе при одновременном снижении инерционности ее звеньев. Это позволяет значительно увеличить коэффициент усиления, сохранив прежний запас устойчивости, или обратить неустойчивую систему в устойчивую. Кроме того, динамические ошибки системы уменьшатся, а ее быстродействие возрастет. В статических САР введение дополнительного воздействия по производной сигнала рассогласования также улучшает качество работы системы, т.к. ее инерционность уменьшается. Введение интеграла от ошибки представляет собой метод повышения порядка астатизма системы, а значит, и увеличения ее точности. Однако при этом осуществляется отставание (отрицательный сдвиг) по фазе на –90 град., что ухудшает условия устойчивости и качество переходного процесса. Если регулирование с воздействием по производной сигнала рассогласования снижает динамические ошибки системы, то введение дополнительного воздействия по интегралу сигнала рассогласования приводит к уменьшению статических ошибок систем. Для осуществления коррекции последовательно со звеньями системы включают интеграторы. Построив логарифмические АФЧХ исходной системы и той же системы с последовательно включенным интегрирующим звеном, можно убедиться, что регулирование с воздействием по интегралу сигнала рассогласования увеличивает коэффициент усиления системы, особенно на низких частотах при одновременном снижении статических ошибок. Однако при этом уменьшается быстродействие системы и ее запас устойчивости. Для устранения этого недостатка применяют комбинированную коррекцию с воздействием по интегралу и по производной сигнала рассогласования. Введение изодромной коррекции вида
— объединяет в себе введение интеграла и производной. Оно позволяет избежать недостатков предыдущей коррекции и получать необходимый порядок астатизма системы, сохраняя устойчивость и качество системы в переходном режиме. Следовательно, если в случае простого введения интеграла регулирование в системе производится не по величине ошибки, а только по интегралу от нее, то при изодромном устройстве мы получаем регулирование по ошибке и по интегралу (аналогично тому, как это было показано при регулировании по ошибке и по ее производной). 1.4. ВКЛЮЧЕНИЕ ФУНКЦИОНАЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ПАРАЛЛЕЛЬНО НЕКОТОРЫМ ЗВЕНЬЯМ КОНТУРА РЕГУЛИРОВАНИЯ – МЕСТНЫЕ ОБРАТНЫЕ СВЯЗИ (ОС)
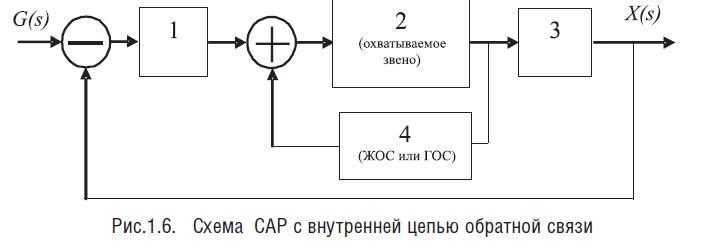
Местные жесткие ОС (ЖОС) применяют для повышения устойчивости системы. ЖОС действует на систему как в переходном, так и установившемся режимах: цепь ЖОС содержит только безынерционные элементы (обозначим коэффициент ОС как Кос), благодаря которым выходной сигнал этой цепи (звена 4 на рис.1.6) в любом режиме работы системы всегда прямо пропорционален выходному сигналу звена, охваченного этой связью (звено 2).
Рассмотрим два случая введения ЖОС: 1) ЖОС охватывает интегрирующее звено
В этом случае частотная характеристика звена, охваченного ЖОС, имеет вид:
Отсюда следует, что интегрирующее звено, охваченное ЖОС, приобретает свойства апериодического звена с постоянной времени
и коэффициентом передачи
Данное обстоятельство используется для подавления автоколебаний, возникающих в системах, содержащих два интегратора. Применение ЖОС превращает одно из них в апериодическое, в результате чего фазовый сдвиг в системе на низких частотах уменьшается и система из структурно неустойчивой становится устойчивой. 2) ЖОС охватывает апериодическое звено
Отсюда следует, что ЖОС уменьшает постоянную времени апериодического звена, снижая тем самым инерционность всей системы в целом. Рассмотренные примеры показывают, что введение внутренних ЖОС сопровождается соответствующим понижением коэффициента передачи системы, что неблагоприятно сказывается на ее статической точности. Это объясняется тем, что ЖОС действуют не только в переходном, но и в установившемся режиме работы системы. В случае, когда апериодическое звено охватывается положительной ЖОС, осуществляется увеличение Кп; однако, одновременно с этим увеличивается и постоянная времени, т.е. инерционность звена (охватываемого), оно может стать неустойчивым. В отличие от ЖОС действие гибких ОС (ГОС) проявляется только в переходном режиме работы системы. Выходной сигнал ГОС (звено 4 на рис. 1.6) зависит не от величины выходного сигнала охватываемого звена (2), а от скорости его изменения. Поэтому к моменту достижения системой нового установившегося значения действие цепи ГОС прекращается. Можно показать, что постоянная времени апериодического и затухание колебательного звеньев возрастут, если их охватить ГОС. Это обстоятельство используют для повышения запаса устойчивости статических систем и для подавления колебаний. В астатических системах гибкой ОС охватывают участок, содержащий интегрирующее и апериодическое звенья, чем достигается существенное уменьшение инерционности этого участка, а следовательно, и всей системы в целом. 1.5. ВКЛЮЧЕНИЕ ФУНКЦИОНАЛЬНЫХ БЛОКОВ, ОСУЩЕСТВЛЯЮЩИХ ПРЕОБРАЗОВАНИЕ ВНЕШНЕГО ВОЗДЕЙСТВИЯ Обычно рассматривают два типа коррекции: 1) по задающему воздействию; 2) по возмущающему воздействию. Напомним, что задающие воздействия система должна воспроизводить, а возмущающие – нейтрализовать. Поэтому во втором случае возникают существенные трудности, заключающиеся в том, что возмущающие воздействия, в отличие от задающих, далеко не всегда можно измерить и подать на вход корректирующего устройства. 1.6. ПРОПОРЦИОНАЛЬНЫЕ РЕГУЛЯТОРЫ
Для системы регулирования, показанной на рис.1.7а, амплитудно-фазовая частотная характеристика (АФЧХ) определяется выражением W(jω) = Wp(jω) . Wоб(jω), где Wp(jω) – АФЧХ регулятора, Wоб(jω) – АФЧХ объекта регулирования. Если комплексная частотная характеристика регулятора будет Wp(jω) = kр, то АФЧХ всей системы запишется в виде W (jω) = kр Wоб(jω). Следовательно, при подключении к объекту пропорционального регулятора АФЧХ системы на каждой частоте увеличивается в kр раз. Пропорциональные регуляторы и имеют один параметр настройки – коэффициент передачи kр. Переходные процессы в П-регуляторе описываются выражением u = kр ∗ ε. Здесь ε – входное воздействие на регулятор, равное отклонению регулируемой величины от заданного значения; u – воздействие регулятора на объект, направленное на ликвидацию отклонения регулируемой величины от заданного значения. На рис.1.8. приведен пример контура регулирования температуры приточного воздуха в канальном кондиционере.
Температура воздуха поддерживается водяным калорифером, через который пропускается теплоноситель. Воздух, проходя через калорифер, нагревается. Температура воздуха после водяного калорифера измеряется датчиком (Т), далее эта величина поступает на устройство сравнения (УС) измеренного значения температуры (Тизм) и заданного (Tзад). В зависимости от разности между температурой уставки и измеренным значением температуры регулятор (Р) вырабатывает сигнал, воздействующий на исполнительный механизм (М – электропривод трехходового клапана). Электропривод открывает или закрывает трехходовой клапан до положения, при котором ошибка ε = Tзад – Тизм будет стремиться к нулю. Выходным сигналом регулятора может быть напряжение в определенном диапазоне (например, постоянное напряжение в диапазоне от 0 до 10 В, ток 0–20мА и т. д). Диапазон изменения выходного сигнала называется диапазоном регулирования (рис.1.9).
Диапазон изменения сигнала ошибки называют пропорциональным диапазоном. В П-регуляторах имеется возможность изменять диапазон регулирования и пропорциональный диапазон. Из графика на рис.1.9. видно, что чем меньше пропорциональный диапазон, тем круче характеристика регулирования. Кривая (1) соответствует диапазону изменения температуры 0–10 °С, а кривая (2) – диапазону 0–4°С. Величина kр = есть коэффициент регулирования. В первом случае kр = 1, а во втором kр ΔU/ε= 2,5. При больших значениях kp в контуре регулирования могут возникнуть колебания (рис.1.10).
Так, если во время включения системы температура воздуха Тизм ниже заданной температуры Tзад, устройство управления выдает большой сигнал на открытие трехходового клапана. Температура водяного калорифера и приточного воздуха начнет повышаться. Когда температура приточного воздуха после водяного калорифера достигает Tзад, устройство управления выдает команду на закрытие трехходового клапана (точка t1 на рис. 1.10). Однако из-за того, что калорифер разогрет, температура приточного воздуха до момента t2 еще будет расти, а затем начнет снижаться. Этот процесс имеет вид затухающих колебаний, и через определенное время (t3) процесс стабилизируется. После стабилизации из-за инерционности системы всегда будет существовать статическая ошибка Δст = Tзад – Тизм. Сигнал на выходе регулятора будет иметь вид u(t) = U0 + kp ∗ε, где U0 – сигнал на выходе устройства управления при ε = 0. Чем большим выбран пропорциональный диапазон регулирования, тем большей будет величина статической ошибки. При малой величине пропорционального диапазона увеличивается время переходных процессов, и при некоторых условиях может возникнуть автоколебательный (незатухающий) процесс в контуре регулирования. Путем выбора параметров регулирования П-регулятора можно существенно уменьшить установившуюся ошибку регулирования, однако ее полное устранение не представляется возможным даже теоретически. Из рис.1.8 видно, что в цепочке регулирования в реальном регуляторе установлено еще одно звено – исполнительный механизм (М). В данном случае – это электродвигатель привода трехходового клапана. Электрический привод является интегрирующим звеном и его влияние по возможности уменьшают, используя обратные связи. Это связано с тем, что динамические свойства участка, охваченного обратной связью, не зависят от динамических свойств прямого участка, а определяются в основном динамическими свойствами звена обратной связи. Эта особенность широко используется на практике при разработке автоматических регуляторов. Исходя из этого, для устранения влияния исполнительного механизма его необходимо охватить отрицательной обратной связью. Для повышения коэффициента передачи прямого канала отрицательной обратной связью нужно охватить и усилительное звено регулятора. Такие П-регуляторы, называемые позиционерами, можно представить в виде последовательного соединения собственно П-регулятора и некоторого балластного звена с постоянной времени Тб. На рис.1.11 представлена структурная схема П-регулятора, а на рис.1.12 – реализуемый ею закон регулирования.
Параметром настройки регулятора является коэффициент передачи устройства обратной связи kос. Коэффициент передачи регулятора kп тем больше, чем меньше kос. Однако следует иметь в виду, что чем больше kп, тем больше постоянная времени балластного звена и тем больше искажается идеальный закон П-регулирования. 1.7. ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЕ РЕГУЛЯТОРЫ Математически этот процесс может быть описан следующей зависимостью:
где ku=1/Тu – коэффициент пропорциональности интегральной составляющей, а Тu — постоянная времени интегрирования, параметр настройки регулятора. Если ku не равно 0, то даже при незначительных отклонениях регулируемой величины сигнал со временем может достичь любой величины, что приведет к перемещению регулирующего органа до момента, пока ε не станет равным 0. Рассмотрим физический смысл постоянной времени интегрирования. Предположим, что на вход регулятора поступил сигнал ε = ε0, а пропорциональная составляющая отсутствует (kп = 0). При этом выходной сигнал будет меняться по закону u= ε0 ∗ t/Tu. По истечении времени t = Tu значение выходного сигнала будет равно u = ε0 (рис.1.13а). Таким образом, постоянная времени интегрирования в И'регуляторе равна времени, в течение которого с момента поступления на вход регулятора постоянного сигнала сигнал на выходе регулятора достигнет значения, равного значению входного сигнала. Переходной процесс в И-регуляторе показан на рис.1.13б. Устраняя статическую ошибку интегральный регулятор, однако, ухудшает качество переходного процесса. Поэтому на практике применяют комбинированные ПИ-регуляторы.
При этом используется как параллельное соединение пропорционального и интегрального звена (рис.1.14а), так и последовательное соединение (рис.1.14б).
ПИ-регулятор оказывает воздействие на регулирующий орган пропорционально отклонению и интегралу от отклонения регулируемой величины
Для схемы на рис.1.14а частотная характеристика ПИ-регулятора имеет вид
При скачкообразном изменении регулируемой величины на значение ε0 ПИ-регулятор со скоростью, определяемой быстродействием привода, перемещает исполнительный механизм на величину (kp∗ ε0), после чего исполнительный механизм дополнительно перемещается в ту же сторону со скоростью ε0/Ти, пропорциональной отклонению регулируемой величины. Следовательно, в ПИ'регуляторе при отклонении регулируемой величины от заданного значения мгновенно срабатывает пропорциональная (статическая) составляющая регулятора, а затем постепенно увеличивается интегральная (астатическая) составляющая регулятора. Переходная характеристика ПИ-регулятора для параллельного соединения на рис.1.14а показана на рис.1.15(прямая 1).
Параметрами настойки являются независящие друг от друга коэффициенты усиления kp и постоянная времени интегрирования Ти. Схема на рис.1.15б реализует закон регулирования
где Тиз – постоянная времени изодрома. Частотная характеристика ПИ'регулятора по схеме рис.1.15б имеет вид:
Таким образом, ПИ-регулятор со структурной схемой, приведенной на рис.1.15б, имеет взаимосвязанные параметры настройки статической и астатической частей по коэффициенту kp. Так, при настройке коэффициента усиления kp будет изменяться и постоянная времени интегрирования:
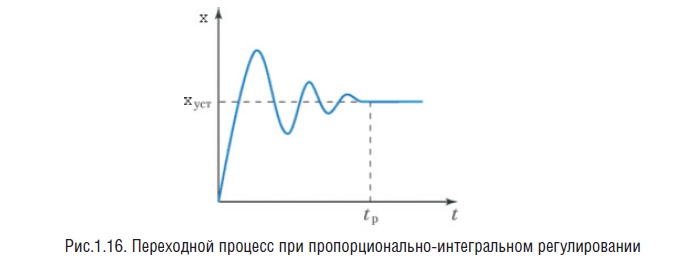
Рассмотрим физический смысл постоянной времени изодрома Тиз. Предположим, что на вход регулятора поступил постоянный сигнал ε0. Тогда u = kp ε0(1+t/T). При поступлении на вход регулятора сигнала ε0 в начальный момент сработает пропорциональная составляющая и на выходе регулятора появится сигнал u1=kpε0. В дальнейшем линейно начинает нарастать выходной сигнал от интегральной составляющей и при t= Tиз достигнет значения u2=2kpε0. Тиз – это время, в течение которого от начала действия интегральной (астатической) составляющей регулятора пропорциональная (статическая) составляющая удваивается. Переходной процесс при ПИ-регулировании показан на рис.1.16.
ПИ-регулятор обеспечивает нулевую ошибку в установившемся состоянии. Варианты структурных схем промышленных ПИ-регуляторов приведены на рис.1.17.
Выбирая ту или иную схему, можно подобрать наиболее подходящую структуру для Вашей задачи. 1.8. ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЕ (ПИД) РЕГУЛЯТОРЫ
Такое регулирующее воздействие используется в дифференциальных и ПИД-регуляторах. ПИД-регуляторы воздействуют на объект пропорционально отклонению ε регулируемой величины, интегралу от этого отклонения и скорости изменения регулируемой величины:
По своим возможностям ПИД-регуляторы являются наиболее универсальными. Используя их, можно получить любой закон регулирования. Структурная схема и закон регулирования идеального или параллельного ПИД-регулятора приведены на рис.1.18.
При скачкообразном изменении регулируемой величины ПИД-регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на объект регулирования, затем величина воздействия резко падает до значения, определяемого пропорциональной составляющей, после чего постепенно начинает оказывать влияние интегральная составляющая регулятора. Переходной процесс при этом (рис.1.19) имеет минимальные отклонения по амплитуде и по времени.
Параметрами настройки ПИД-регуляторов являются коэффициент пропорциональности регулятора |
| Сообщения: 463 | |